Objectives

CONCERT work plan involves the following Scientific and Technical Objectives:
Realize
Realize a mobile collaborative robot with adaptable physical skills, which can be quickly tailored to address the specificities of diverse unstructured workspaces and tasks, while tackling the needs of heavy payload tasks in terms of physical strength and interaction.
Develop
Develop synthesis and automatic control and interface generation tools for configurable robots enabling non-expert users to quickly configure, deploy and operate task-suitable collaborative robots in unstructured workspaces.
Develop
Develop safety verification methods and a human-robot interaction control framework to permit the safe interaction and cooperation of human partners with the fully configurable and physically strong collaborative robot.
Develop
Develop methods to enhance the human and robot awareness and improve efficiency in human robot collaboration by exploring the tracking, prediction and interpretation of human actions and intentions, as well as shared autonomy and role allocation planning strategies.
Integrate
Integrate the technologies into a configurable robot for construction tasks and evaluate the impact of the developed robotic solutions in common construction tasks considering the efficiency, productivity and reduction of cost.
Evaluate
Evaluate the compliance of the developed technologies with the relevant legislation regulations including legislation and ethical regulations concerning the use of high-power collaborative robots and interaction technologies
Use Cases
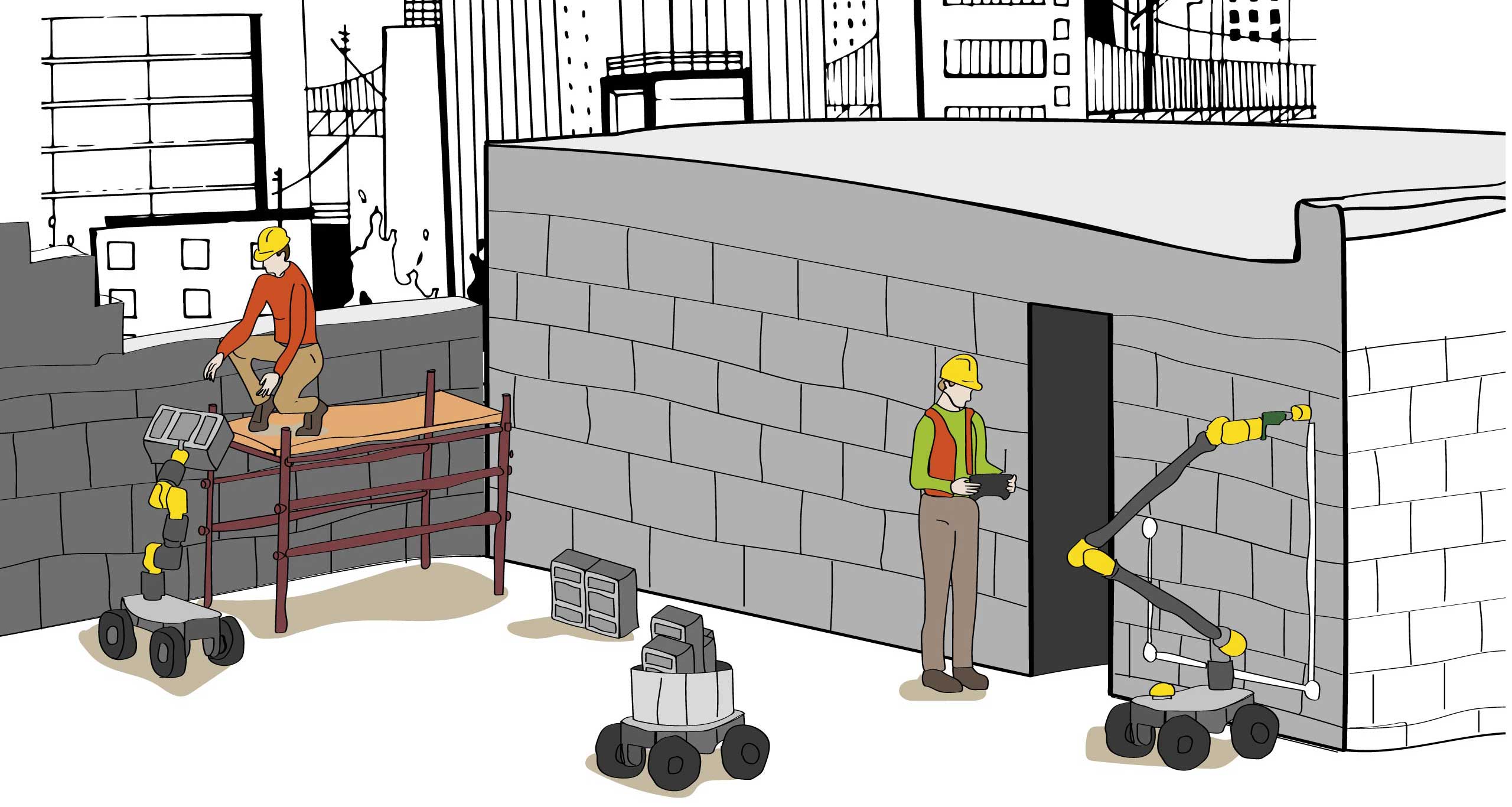
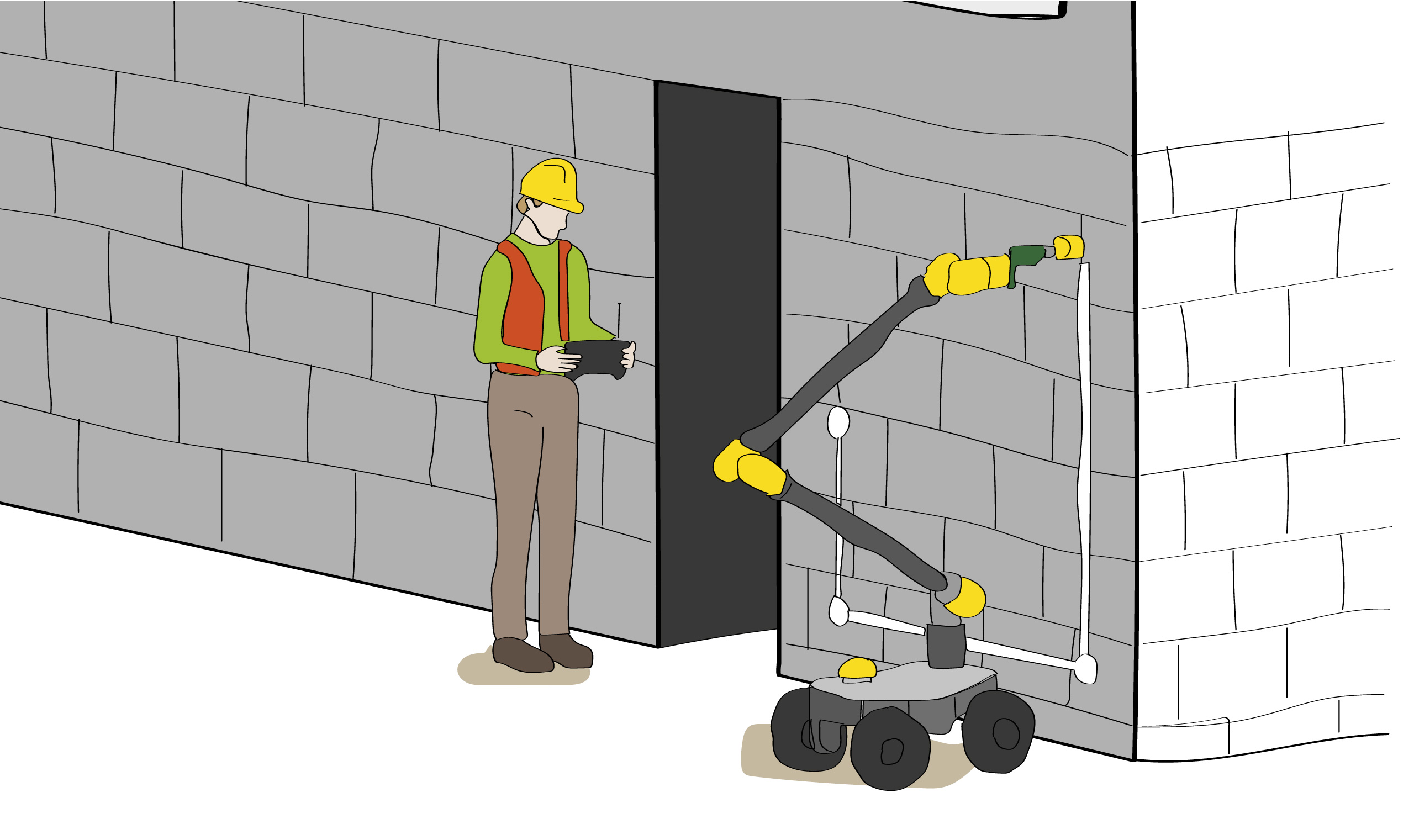
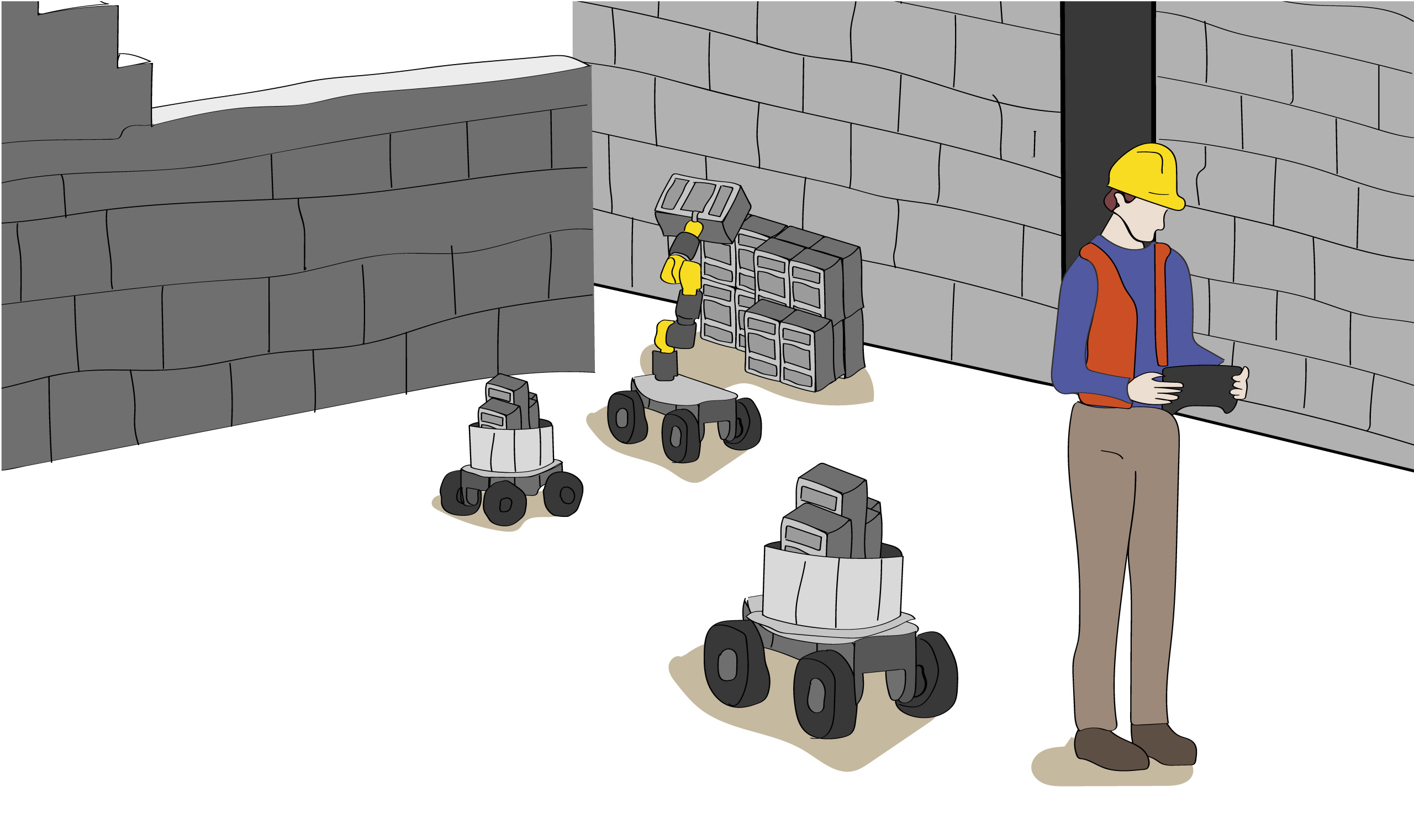
The project has a clear focus on developing robotics technologies aiming at a new concept of configurable robot platforms, which can be explored in application domains with evolving workspace settings and tasks. Construction sites offer particularly relevant challenges, with the variability in the task settings being an extensively present characteristic. Therefore, the scientific and technological developments of CONCERT, their integration as well as their assessment will be driven by use-case scenarios from the construction sector.

{kind=link}

{kind=link}

{kind=link}

{kind=link}